
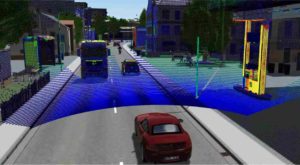
自駕車虛擬場景 利用MSC VTD建構
2021年,星恆科技與國家實驗研究院及MSC台灣分公司共同合作,針對臺南沙崙自駕車場域進行 自駕車虛擬場景 建構。其中,星恆科技負責路面繪製及外部模型導入,包含建築物、紅綠燈、警示牌及鐵路平交道等等……。其成果亦於2021智慧城市展及台南沙崙科學城啟用典禮當天展出。

為 什 麼 需 要 虛擬場景?
駕駛場景構建和模擬是自動駕駛模擬測試中的重要環節,大程度上影響著模擬測試的效果,常見的測試有感知模擬、駕駛行為模式、對於環境感知的了解等等,因此建構一個逼真且完整的虛擬場景顯得十分重要。
一個完整的虛擬場景主要可以由路面及外部模型組成:
1.OpenDRIVE路面
什麼是OpenDRIVE路面?
OpenDRIVE是台灣高精地圖中心選定為最底層靜態圖資的標準格式,且已完成高精地圖圖資標準與驗證指引。

如何繪製路面?
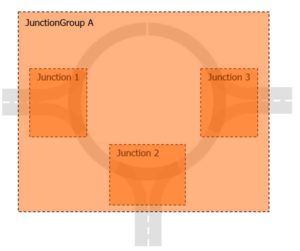
MSC VTD為自駕車情境模擬軟體,它提供了用於道路生成、場景定義、交通和聲音模擬、模擬控制及圖像生成等等的模塊化工具集。因此我們可以快速地利用ROD(Road Designer)模塊對路面進行建立及編輯,如標線、路寬及Junction之間的連接。
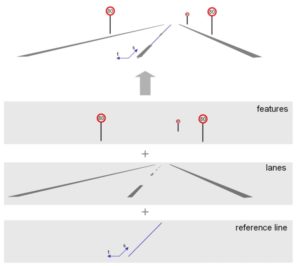
2.外部模型
真實道路中有各式各樣的景象,而為了使虛擬場景更加逼真,必須將外部的模型繪製成CAD並導入ROD,如建築物、隧道、告示牌及交通號誌等等,其中紅綠燈必須切換燈號及路燈於夜晚中點亮更是對於感知模擬極其重要。

總結
因應自駕車議題日益升溫,虛擬場景的應用越來越受重視,星恆科技也超前部署了建構虛擬場景的能力,不論是路面的繪製或是外部模型的導入我們都有相當的經驗及成果,若您有相關的需求也歡迎與我們進行聯繫討論!
延伸閱讀: